在工業(yè)4.0浪潮的推動(dòng)下,自動(dòng)化工廠已成為制造業(yè)轉(zhuǎn)型升級(jí)的關(guān)鍵方向。作為自動(dòng)化生產(chǎn)的核心執(zhí)行單元,機(jī)械手及各類(lèi)工業(yè)控制產(chǎn)品構(gòu)成了智能工廠的“神經(jīng)”與“肌肉”。本文將系統(tǒng)梳理自動(dòng)化工廠必備的十大工控產(chǎn)品,并深入探討機(jī)械手在其中的核心作用與選型要點(diǎn)。
一、自動(dòng)化工廠十大必備工控產(chǎn)品概覽
- 可編程邏輯控制器(PLC):作為工業(yè)自動(dòng)化的大腦,PLC負(fù)責(zé)邏輯控制、順序操作與數(shù)據(jù)處理,是協(xié)調(diào)整個(gè)生產(chǎn)線的指揮中心。
- 工業(yè)機(jī)械手/機(jī)器人:包括多關(guān)節(jié)機(jī)器人、SCARA機(jī)器人、并聯(lián)機(jī)器人等,承擔(dān)搬運(yùn)、裝配、焊接、噴涂等重復(fù)性高、精度要求嚴(yán)的任務(wù)。
- 人機(jī)界面(HMI):提供操作員與控制系統(tǒng)之間的交互窗口,實(shí)現(xiàn)設(shè)備狀態(tài)監(jiān)控、參數(shù)設(shè)置與故障診斷。
- 伺服驅(qū)動(dòng)系統(tǒng):由伺服電機(jī)與驅(qū)動(dòng)器組成,為機(jī)械手等高精度設(shè)備提供精準(zhǔn)的位置、速度與扭矩控制。
- 機(jī)器視覺(jué)系統(tǒng):通過(guò)工業(yè)相機(jī)、鏡頭與圖像處理軟件,實(shí)現(xiàn)產(chǎn)品質(zhì)量檢測(cè)、定位引導(dǎo)與識(shí)別分類(lèi),賦予設(shè)備“視覺(jué)”能力。
- 傳感器網(wǎng)絡(luò):包括接近開(kāi)關(guān)、光電傳感器、力傳感器等,實(shí)時(shí)采集現(xiàn)場(chǎng)溫度、壓力、位置等數(shù)據(jù),構(gòu)成控制系統(tǒng)的感知基礎(chǔ)。
- 工業(yè)通信網(wǎng)絡(luò)設(shè)備:如PROFINET、EtherCAT等工業(yè)以太網(wǎng)組件,確保PLC、機(jī)械手、HMI等設(shè)備間高速可靠的數(shù)據(jù)交換。
- 安全控制系統(tǒng):涵蓋安全光幕、急停按鈕、安全繼電器等,保障人員與設(shè)備在自動(dòng)化環(huán)境下的安全運(yùn)行。
- 變頻器與電機(jī)控制:用于風(fēng)機(jī)、泵類(lèi)、傳送帶等設(shè)備的調(diào)速控制,實(shí)現(xiàn)節(jié)能與工藝優(yōu)化。
- 數(shù)據(jù)采集與監(jiān)控系統(tǒng)(SCADA):對(duì)分散的生產(chǎn)設(shè)備進(jìn)行集中監(jiān)控與管理,實(shí)現(xiàn)生產(chǎn)數(shù)據(jù)可視化與歷史追溯。
二、機(jī)械手:自動(dòng)化工廠的“萬(wàn)能巧手”
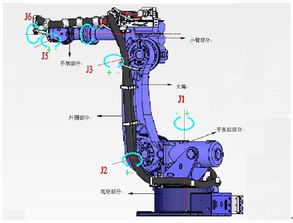
在十大工控產(chǎn)品中,機(jī)械手(工業(yè)機(jī)器人)無(wú)疑是自動(dòng)化產(chǎn)線上最引人注目的明星。它通過(guò)模仿人類(lèi)手臂的結(jié)構(gòu)與功能,將PLC的指令轉(zhuǎn)化為精準(zhǔn)的物理動(dòng)作。
機(jī)械手的關(guān)鍵技術(shù)參數(shù)與選型考量:
- 負(fù)載能力:根據(jù)搬運(yùn)工件重量選擇,需預(yù)留20%-30%安全余量。
- 工作范圍:考慮機(jī)器人的臂展與活動(dòng)空間能否覆蓋所有工位。
- 重復(fù)定位精度:高精度裝配通常要求±0.02mm以?xún)?nèi),普通搬運(yùn)可放寬至±0.1mm。
- 自由度(軸數(shù)):6軸機(jī)器人靈活性最高,適用于復(fù)雜軌跡;4軸(SCARA)適合平面內(nèi)快速拾放。
- 防護(hù)等級(jí):根據(jù)環(huán)境選擇,如IP54防塵防水適用于一般車(chē)間,IP67可應(yīng)對(duì)潮濕、油污環(huán)境。
- 集成易用性:評(píng)估其與PLC、視覺(jué)系統(tǒng)的通信接口(如Ethernet/IP、PROFINET)是否兼容,編程軟件是否友好。
三、系統(tǒng)集成:構(gòu)建協(xié)同高效的智能產(chǎn)線
自動(dòng)化工廠的效能不僅取決于單個(gè)產(chǎn)品性能,更在于各工控產(chǎn)品間的無(wú)縫集成。例如,PLC通過(guò)工業(yè)網(wǎng)絡(luò)向機(jī)械手發(fā)送動(dòng)作指令;視覺(jué)系統(tǒng)識(shí)別工件位置后,將坐標(biāo)數(shù)據(jù)反饋給機(jī)械手進(jìn)行精準(zhǔn)抓取;傳感器實(shí)時(shí)監(jiān)測(cè)機(jī)械手運(yùn)行狀態(tài),異常時(shí)觸發(fā)安全系統(tǒng)停機(jī)。這種緊密協(xié)作,使得機(jī)械手能夠適應(yīng)小批量、多品種的柔性生產(chǎn)需求。
四、未來(lái)趨勢(shì):智能化與柔性化升級(jí)
隨著人工智能與物聯(lián)網(wǎng)技術(shù)的滲透,新一代機(jī)械手正朝著“智能化”方向演進(jìn):
- 協(xié)作機(jī)器人(Cobot):無(wú)需安全圍欄,可與工人共享工作空間,適應(yīng)人機(jī)協(xié)同場(chǎng)景。
- 力控感知技術(shù):通過(guò)力傳感器實(shí)現(xiàn)自適應(yīng)抓取與精密裝配,如手機(jī)零部件組裝。
- AI視覺(jué)引導(dǎo):結(jié)合深度學(xué)習(xí)算法,使機(jī)械手能夠識(shí)別雜亂堆放的零件并自主規(guī)劃抓取路徑。
- 數(shù)字孿生:在虛擬環(huán)境中模擬調(diào)試機(jī)械手程序,縮短現(xiàn)場(chǎng)部署時(shí)間,優(yōu)化運(yùn)動(dòng)軌跡。
構(gòu)建一個(gè)高效可靠的自動(dòng)化工廠,需要以PLC為控制核心,以機(jī)械手為執(zhí)行骨干,并配以傳感、驅(qū)動(dòng)、通信、安全等九大類(lèi)工控產(chǎn)品形成完整生態(tài)。其中,機(jī)械手的選型與集成水平直接決定了生產(chǎn)線的自動(dòng)化程度與柔性生產(chǎn)能力。企業(yè)在規(guī)劃自動(dòng)化升級(jí)時(shí),應(yīng)基于自身工藝需求,綜合考慮產(chǎn)品的技術(shù)匹配性、系統(tǒng)開(kāi)放性與未來(lái)擴(kuò)展空間,方能打造出真正降本增效的智能制造系統(tǒng)。